El motor eléctrico representa uno de los avances más significativos en la historia de la ingeniería eléctrica. Esta máquina electrotécnica convierte la energía eléctrica en energía mecánica, desencadenando el movimiento de diversos dispositivos y maquinarias. Su funcionamiento es esencialmente el opuesto al de un generador eléctrico, que convierte la energía mecánica en energía eléctrica.
El concepto del motor eléctrico se consolidó gracias a los hallazgos fundamentales de pioneros como Franz Ernst Neumann y James Clerk Maxwell en los años 1841 y 1873, respectivamente. Estos científicos sentaron las bases teóricas que permitieron el desarrollo y la aplicación práctica de los motores eléctricos en diversas industrias y ámbitos de la vida cotidiana.
Desde entonces, los motores eléctricos han revolucionado la forma en que interactuamos con la tecnología moderna, impulsando una amplia gama de dispositivos y sistemas, desde electrodomésticos hasta maquinaria industrial de gran escala. Su versatilidad y eficiencia los convierten en elementos indispensables en la era de la electrificación, contribuyendo al progreso y la innovación en todo el mundo.
¿Cómo funciona un motor eléctrico?
El funcionamiento de un motor eléctrico varía según el tipo de motor del que forman parte.
Funcionamiento de un motor de corriente continua con inducción permanente
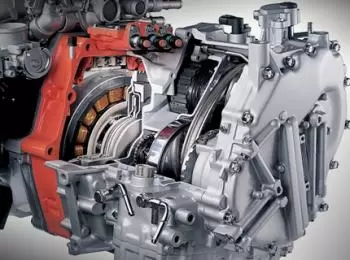
El motor de corriente continua es el motor más sencillo. Yendo del exterior del motor hacia el interior encontramos:
- La carcasa o cárter, que tiene un sistema de fijación a la bancada o chasis. En el cárter hay un conjunto llamado estator o inductor que está formado por un soporte de chapas y unos imanes o electroimanes.
- El rotor, que está formado por un núcleo de chapas sobre un eje que lo soporta todo. El eje está rodeado por una serie de bobinados que están conectados a las delgas del colector. A través de las delgas del colector se recibe la corriente eléctrica. Todo esto está soportado por los cojinetes en los extremos del cárter.
- A un lado del eje está la polea. La polea es una corona dentada o acoplamiento que transmite la energía mecánica para ser aprovechada.
Cuando se hace llegar la corriente a través de las escobillas al colector, se hace pasar una corriente eléctrica por los conductores de las bobinas, que por la regla de la mano izquierda (recordar que están sumergidos en el campo del estator), crea una fuerza lateral, y la suma de todas ellas nos da el par que hace girar el conjunto rotor o motor. Por medio del colector, se va dando corriente a las bobinas adecuadas para que este par sea lo más fuerte posible. Son los motores que hay en aparatos que son movidos por pilas o baterías.
Motor de corriente continua con inducción variable y corriente alterna universal
Es lo mismo que el motor con inducción permanente, pero en este caso lo que produce el campo son unas bobinas que trabajan como un electroimán, y están conectadas al rotor en serie o paralelo. Este motor también trabaja con corriente alterna monofásica. El ejemplo más común son los motores de los electrodomésticos de uso normal.
Motor eléctrico de corriente alterna asíncrono
En un motor asíncrono, en el estator hay tres grupos de bobinados. Estos bobinados se corresponden con las tres fases de la corriente alterna comercial, y el rotor en vez del colector, lleva tres anillos, que están conectados a los bobinados del rotor. Este tipo de motor eléctrico funciona por el mismo principio, aunque debido al desplazamiento entre fases, se produce un campo rotatorio, que en cierto modo arrastra el rotor.
Un caso particular muy utilizado es el motor jaula de ardilla, ya que es un motor muy sencillo. En el que las delgas y bobinados del rotor, son sustituidos por unas varillas con unos anillos en los extremos juntando las varillas, de ahí su nombre.
En los motores de corriente alterna asíncronos se pueden conectar los bobinados de dos maneras: En estrella, cuando un extremo de las bobinas es común y el otro conectado a cada una de las fases. El otro es en triángulo, cuando los extremos de las bobinas, van conectadas entre sí y en una fase. El intercambio de dos fases, provoca de inversión del sentido de giro.
Es el motor más comúnmente empleado en la industria, con el sistema de arranque estrella triángulo.
Motor eléctrico de corriente alterna síncrono
El motor síncrono se llama así porque la velocidad de giro, está relacionada con la frecuencia de la corriente de alimentación. Esta característica se debe al hecho de que el rotor es alimentado con corriente continua, y es arrastrado por el campo giratorio que produce las bobinas de el estator.
Normalmente este motor de corriente alterna lleva una dinamo acoplada en el mismo eje motor para alimentar el rotor. Como varía la velocidad con la frecuencia y que permite fijar el par motor con un mínimo consumo, mediante ser acoplados a un oscilador se puede variar muy fácilmente su velocidad, y por lo tanto se utiliza en sistemas de tracción ( AVE-TGV).
Motor paso a paso
El motor paso a paso está alimentado con corriente continua, y el rotor contiene una serie de imanes permanentes, que son arrastrados por las bobinas del estator, que son gobernadas por una electrónica de potencia, determinando el ángulo de giro, los que tienen mando proporcional, son extremadamente precisos en el ángulo de giro, o posición. Estos motores se usan mucho en los servos de movimiento de las máquinas de control numérico, o en los motores de lectura / escritura de los discos duros de ordenador.
Motor lineal
De manera básica, un motor lineal es un motor asíncrono que se ha desarrollado, por lo que en vez de crear un par giratorio, crea un desplazamiento lineal, por el desplazamiento de las fases. Estos motores se dividen en dos grandes grupos:
- Los de aceleración lenta que se utilizan en transporte Sky Train, Maglev, etc.
- DE aceleración rápida utilizados en armas como el cañón magnético y artefactos espaciales.
Dentro de la misma categoría y están las bombas electromagnéticas de inducción que permiten circular a fluidos conductores. Las primeras pruebas se hicieron con mercurio, luego con una mezcla de sodio y potasio, en vistas de la circulación de sodio para la refrigeración en algunas centrales nucleares.
Tipos de motres eléctricos
Los motores eléctricos se categorizan principalmente según el tipo de corriente eléctrica que utilizan:
1. Motores de corriente continua (CC)
Los motores de corriente continua utilizan una fuente de alimentación de corriente continua para su funcionamiento. Estos motores son ampliamente utilizados en una variedad de aplicaciones debido a su capacidad para ofrecer un control preciso de la velocidad y el par motor.
Dentro de esta categoría, se pueden encontrar el motor de inducción permanente, que utiliza imanes permanentes en el rotor, y el motor de inducción controlada, que permite variar la velocidad de manera controlada.
2. Motores de corriente alterna (CA)
Los motores de corriente alterna son alimentados por una fuente de corriente alterna. Estos motores son extremadamente comunes en muchas aplicaciones industriales y domésticas debido a su simplicidad de diseño y bajo costo. Eeste tipo de motor es el más utilizado en vehículos eléctricos, específicamente el motor de imanes permanentes síncrono de corriente alterna.
Los motores de corriente alterna pueden subdividirse en varias categorías, incluyendo:
- Motor universal: Este tipo de motor puede funcionar tanto con corriente continua como con corriente alterna. Se caracterizan por su alta velocidad y su capacidad para proporcionar un alto par motor.
- Motor síncrono: En este tipo de motor, la velocidad del rotor está sincronizada con la frecuencia de la corriente alterna suministrada. Se utilizan en aplicaciones que requieren una velocidad constante y precisa destacando su uso en coches eléctricos.
- Motor asíncrono (Inducción): También conocido como motor de inducción, este tipo de motor es el más comúnmente utilizado en aplicaciones industriales y comerciales debido a su bajo costo y su robustez.
Además de estas clasificaciones más tradicionales, han surgido motores más modernos que abordan necesidades específicas en diversas aplicaciones, como los motores paso a paso, que se utilizan en sistemas de posicionamiento y control de precisión, y los motores lineales, que ofrecen movimiento lineal directo en lugar de rotativo.
Eficiencia y rendimiento
 La eficiencia y el rendimiento de los motores eléctricos son aspectos críticos que impactan en su aplicabilidad, costos operativos y su huella ambiental. A continuación, se examinan los conceptos clave relacionados con la eficiencia y el rendimiento de estos motores:
La eficiencia y el rendimiento de los motores eléctricos son aspectos críticos que impactan en su aplicabilidad, costos operativos y su huella ambiental. A continuación, se examinan los conceptos clave relacionados con la eficiencia y el rendimiento de estos motores:
- La eficiencia energética se define como la relación entre la potencia de salida útil y la potencia de entrada eléctrica, determinando la capacidad del motor para convertir energía eléctrica en trabajo mecánico. Los motores modernos se diseñan para lograr altos niveles de eficiencia reduciendo el consumo de energía.
- A pesar de avances en diseño, los motores aún sufren pérdidas, incluyendo resistencia eléctrica en los devanados (pérdidas en el cobre), histéresis y corrientes de Foucault en materiales magnéticos, pérdidas mecánicas por fricción y cargas inerciales, así como pérdidas en rodamientos. La minimización de estas pérdidas es esencial para mejorar la eficiencia.
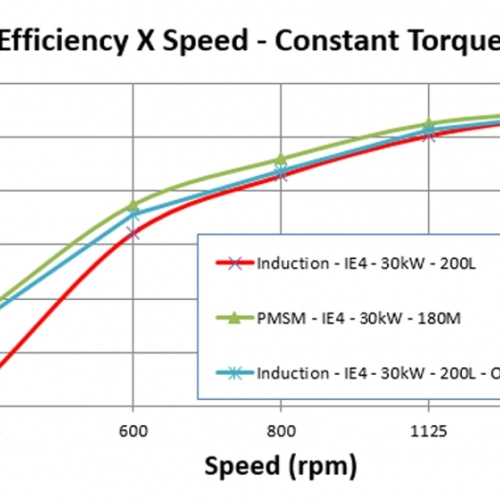
- La curva de eficiencia muestra que los motores alcanzan su punto óptimo cerca de su carga nominal, disminuyendo su eficiencia a cargas más bajas o más altas.
Los fabricantes están en constante búsqueda de mejoras en la eficiencia, como el uso de materiales conductores de alta pureza, diseño aerodinámico de rotores y estatores, y tecnologías de control avanzadas para optimizar el rendimiento en tiempo real.
Por otro lado, para impulsar la adopción de motores más eficientes, muchas regiones han establecido normativas y estándares que imponen requisitos mínimos de eficiencia. Estas regulaciones, como las clasificaciones de eficiencia energética de la EPA y la Comisión Europea, fomentan la adopción de tecnologías más eficientes, contribuyendo a la reducción del consumo de energía y las emisiones de carbono.
Historia de los motores eléctricos
En 1821, a raíz del descubrimiento del fenómeno del electromagnetismo por el químico danés Hans Christian Ørsted, el físico inglés Michael Faraday construyó dos aparatos para producir lo que llamó una rotación electromagnética. Estos aparatos consisten con el movimiento circular continuo de un campo magnético alrededor de un hilo. Al hacer la demostración, la primera descripción fue la del motor eléctrico actual, de corriente alterna, lo patentó en 1887 el físico serbio Nikola Tesla.
En el 1822, Peter Barlow creó la rueda de Barlow. La rueda de Barlow es un widget que consiste en un disco metálico cortado en estrella, las extremidades de la estrella están sumergidas en un entrehierro que contiene mercurio. La función del mercurio es asegurar el paso de la corriente.
El primer conmutador utilizable fue inventado en 1832 por William Sturgeon. Más tarde, en el 1834, el Sr. Thomas Davenport fabricó un motor de corriente continua con este invento. El motor de corriente continua fue patentado en 1837. El elevado coste de las baterías no permitió que estos motores eléctricos tuvieran un importante éxito inicial.
No se tiene muy claro quién es el padre de las máquinas asíncronas. Este título se lo disputan tres inventores: Nikola Tesla, Galileo Ferraris y Michail Ossipowitsch.
En el 1887 el físico Nikola Tesla presentó una patente sobre la máquina asíncrona. Al año siguiente presentó 5 patentes más de máquina eléctrica asíncrona. Mientras tanto, Galileo Ferraris publicaba los tratados sobre las máquinas giratorias.
En 1885 Ferraris publica un experimento y, posteriormente, publica una teoría sobre el motor asíncrona en abril de 1888. Finalmente, en 1889 un electricista alemán de origen ruso llamado Michail Ossipowitsch Doliwo-Dobrowolski inventa el primer motor asíncrono de corriente trifásica de jaula de ardilla. Este último motor eléctrico fue construido industrialmente a partir de 1891.